
Research
I recently finished my PhD dissertation on detecting obstacles in marine environments using multimodal data, under the supervision. I have worked on multiple projects involving computer vision, deep learning, and multimodal sytems.
My primary research interests include perception methods for autonomous boats, deep learning, pattern recognition, and cognitive systems. I also enjoy dealing with combinations of different sensors and the corresponding calibration.
I am a teaching assistant for the courses Machine Perception, Robotics and Machine Perception, and Development of Intelligent Systems at FRI.

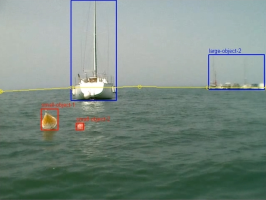
Autonomous boats perception methods
Unmnanned surface vehicles (USV) are robotic boats that can be used for coastal patrolling in a numerous applications ranging from surveillance to water cleanness control. We are developing computer vision algorithms that enable autonomous operation in the highly dynamic environments in which the USVs are applied.
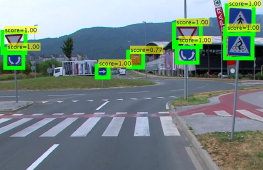
Traffic-sign detection
We explore automation of traffic-sign inventory management using deep-learning models. Models such as Faster R-CNN and Mask R-CNN are improved and applied to traffic sign detection. Instead of specializing in automated detection for only several traffic sign categories we explore possibility of automating the detection of over 200 different traffic signs that are needed to automate the traffic-sign inventory management.

Drone tracking
The tracking algorithms we developed can be applied to autonomous robots like drones. Here are some results from this research application.
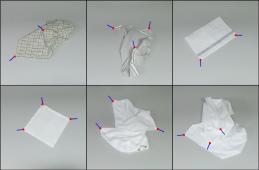
Vision for robotic manipulation
Developing novel vision-based methods for robotic manipulation, with a focus on grasping deformable objects such as cloths, towels, and garments. Introducing CeDiRNet-3DoF and the ViCoS Towel Dataset for benchmarking and advancing cloth manipulation in robotics.
Projects:

DAViMaRAdaptive deep perception methods for autonomous surface vehicles
April 2020
-
August 2023
The project primary goal is to develop the next-generation maritime environment perception methods, which will harvest the power of end-to-end trainable deep models for essential challenges of safe operation like: general obstacle detection with re-identification, implicit detection of hazardous areas and sensor fusion for improved detection.
ViAMaRoRobust computer vision methods for autonomous water surface vehicles
May 2017
-
April 2020
The project primary goal is to develop functionalities required for robust autonomous navigation of USVs in uncontrolled environments, primarily relying on the captured visual information. The project focuses on obstacle detection using monocular and stereo systems, development of efficient visual tracking algorithms for marine environments and environment representation through sensor fusion.

DIVIDDetection of inconsistencies in complex visual data using deep learning
July 2018
-
December 2021
The objective of the project is to develop novel deep learning methods for modelling complex consistency and detecting inconsistencies in visual data using training images annotated with different levels of accuracy. The main project goal is to go beyond the traditional supervised learning, where all anomalies on all training images have to be adequately labelled.
Teaching
- Machine perception (Umetno zaznavanje) - assistant
- Robotics and Computer Perception (Robotika in računalniško zaznavanje) - assistant
- Development of Intelligent Systems (Razvoj inteligentnih sistemov) - assistant
Publications
-
IEEE Robotics and Automation Letters, IEEE, 2024
-
Pattern Recognition, 2024
-
Computer Vision Winter Workshop 2023 : proceedings of the 26th Computer Vision Winter Workshop, 2023
-
International Conference on Advanced Concepts for Intelligent Vision Systems, Springer, 2023
-
Jon Muhovič and Janez PeršInternational Electrotechnical and Computer Science Conference (ERK), 2022
-
IEEE Transactions on Intelligent Transportation Systems, 2021
-
Journal of Oceanic Engineering, IEEE, 2019
-
2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), IEEE, 2019
-
Computer vision winter workshop, 2018
-
Proceedings of the 23rd Computer Vision Winter Workshop, 2018
-
Zbornik šestindvajsete mednarodne Elektrotehniške in računalniške konference ERK 2017, 2017
-
Technical Report, 2017