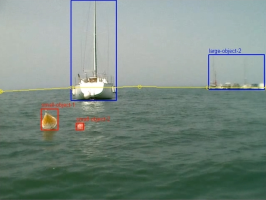
Laboratory is involved in numerous international, national and industrial projects. Current projects COMETAdvanced Computer Vision for Understanding Complex Object Motion in Dynamic Environments January 2025 - December 2027 This project aims to develop a novel motion understanding paradigm, centered on automatically determining the minimal scene understanding required to track one or multiple objects throughout a video. It tackles three core challenges: developing a few-shot object detector capable of identifying all objects in a category based on limited examples, tracking individual objects amid distractors, and extending this to track transformable objects in complex environments. MUXADMultimodal Image Understanding for Explainable Anomaly Detection January 2025 - December 2027 The functional objective of the project is to advance anomaly detection in images by developing multimodal models that integrate visual and linguistic information to not only detect if and where anomalies occur but also explain why. The main research goal is to create novel methods for semantic image understanding, zero-shot multimodal anomaly detection, and multimodal explanations that improve AI’s interpretability and transparency while reducing reliance on annotated data. RoDEORobust Deep Learning for Earth Observation January 2025 - December 2027 This ARIS funded project investigats the relationship between sensor fusion and self-supervised learning for data-driven Earth Observation. We focus on the role of self-supervised deep learning for sensor fusion from the perspective of different sources with different spatial resolutions and spectral coverage. The project is grounded in a real-world application in the field of hydrology, where the goal is to predict the water level in rivers using satellite and drone imagery. The Life and Death of Cultivated Terraces: Computer-Based Recognition and Spatial Analysis of Terraces January 2025 - December 2027 Terraced landscapes are cultural landscapes of special significance. Cultivated terraces, which are often intended for farming, ensure food and have a priceless ecological, cultural, and historical value. Terraced landscapes are disappearing in places due to overgrowth or improper maintenance. In order to raise awareness of their significance, the Honghe Declaration was passed at the global level in 2010. Slovenia still has not managed to implement suitable criteria for terrace identification or introduce a comprehensive management system despite having officially recognized terraces as a valuable element for landscape preservation (see the Decree on Cross-Compliance, Official Gazette of the Republic of Slovenia, no. 97/2015). A precise overview (register) of the locations of cultivated terraces and spatial analyses are required as the foundation for any further measures. SMASHMachine learning for science and humanities postdoctoral program July 2023 - June 2028 SMASH is an innovative, intersectoral, career-development training program for outstanding postdoctoral researchers, co-funded by the Marie Skłodowska-Curie Actions COFUND program. SMASH is open to researchers around the world who are interested in developing cutting-edge machine learning applications for science and humanities. Computer Vision January 2019 - December 2027 Computer vision is becoming a focal problem area of artificial intelligence. On the wings of deep learning it has become very powerful tool for solving various problems involving processing of visual information. In the framework of this programme we are addressing several research questions ranging from visual tracking to visual learning for autonomous robots, with a special emphasis on going beyond supervised deep learning. Past projects EOFuseREarth Observation with Sensor-Fusion and Representation Learning January 2025 - April 2026 This ESA funded project investigates the relationship between sensor fusion and self-supervised learning for data-driven Earth Observation. We focus on the role of self-supervised deep learning for sensor fusion from the perspective of different sources with different spatial resolutions and spectral coverage. The project is grounded in a real-world application in the field of hydrology, where the goal is to predict the water level in rivers using satellite and drone imagery. Sabuvis IISwarm of biomimetic underwater vehicles for underwater intelligence, surveillance and reconnaissance June 2023 - December 2025 This project is a continuation of the successful collaboration enjoyed between Poland, Germany and Portugal in the first SABUVIS project. In this first iteration, three different Biomimetic Underwater Vehicles (BUVs) were constructed with the resulting conclusion that BUVs can be designed with varying degrees of similarity with living organisms. Some of the identified benefits are that undulating propulsion consumes less electrical energy than conventional propulsion systems utilising screw based propellers, and different hydroacoustic signatures are produced with a corresponding lower noise level. TranstrackDeep discriminative tracking and segmentation of translucent objects October 2022 - September 2024 The main goal of this project is to explore the topic of transparent object tracking, which has large potential for being used in practical applications as well as a lot of unanswered research questions. The two main challenges the project is focusing on are robust tracking in presence of distractors and segmentation of transparent objects in a video. MV4.0Data-driven framework for development of machine vision solutions October 2021 - September 2025 MV4.0 developed a data-driven framework for industrial machine vision that reduces reliance on large densely annotated datasets by combining synthetic data generation, annotation-efficient learning, and self-supervised / unsupervised visual modelling. The project concluded with validated methods for surface-defect detection, object localization and 3DoF pose-related perception, public scientific outputs, and a practical demonstration cell. DAViMaRAdaptive deep perception methods for autonomous surface vehicles April 2020 - August 2023 The project primary goal is to develop the next-generation maritime environment perception methods, which will harvest the power of end-to-end trainable deep models for essential challenges of safe operation like: general obstacle detection with re-identification, implicit detection of hazardous areas and sensor fusion for improved detection. GAPTRACKDeep generative appearance modeling in visual tracking July 2019 - December 2021 The challenge that we address in this project is a robust design of deep generative models, their training and application to a visual tracking scenario. We believe that a generative appearance model of the entire object is a crucial step towards grounding visual object tracking in high-level concepts behind raw pixel values. DIVIDDetection of inconsistencies in complex visual data using deep learning July 2018 - December 2021 The objective of the project is to develop novel deep learning methods for modelling complex consistency and detecting inconsistencies in visual data using training images annotated with different levels of accuracy. The main project goal is to go beyond the traditional supervised learning, where all anomalies on all training images have to be adequately labelled. TraPriTradition meets the future - computer vision and augmented reality for the preservation and promotion of natural and cultural heritage April 2018 - August 2018 In this student project we have developed an innovative solution based on mobile computer vision and augmented reality, which presents the tradition of viticulture and wine growing in Vipava valley with the technology of the future. We have developed a prototype of an Android mobile application and a content management system that enable efficient and attractive communication of relevant information. ViAMaRoRobust computer vision methods for autonomous water surface vehicles May 2017 - April 2020 The project primary goal is to develop functionalities required for robust autonomous navigation of USVs in uncontrolled environments, primarily relying on the captured visual information. The project focuses on obstacle detection using monocular and stereo systems, development of efficient visual tracking algorithms for marine environments and environment representation through sensor fusion. GOSTOPBuilding Blocks, Tools and Systems for the Factories of the Future November 2016 - January 2020 The aim of the GOSTOP programme was to accelerate the development of the Factories of the Future concept in Slovenia and to provide solutions to the current needs of Slovene industry. Our goal was to develop efficient machine vision algorithms, coupled with machine learning approaches, which would allow for fast and flexible adaptation of visual inspection systems to be able to deal with novel quality control problems. ViLLarDMaintenance of large databases based on visual information using incremental learning July 2014 - June 2017 The main goal of the project is to develop a framework for semi-supervised interactive incremental learning as well as specific methods for visual learning and recognition that will increase the quality and efficiency of large visual information databases maintenance. CV4footStudy and comparison of advanced computer vision methods for foot modelling in a real-world environment April 2014 - September 2014 In this student project we were exploring the potential of using computer vision techniques for footwear recommendation systems. The maingoal was to improve existing methods with advanced computer vision technologies, to solve the problem of automatic feet modelling, and to determine the suitability of the latest mobile devices for such advanced computer vision algorithms. RoBoatA student PKP project on robotic boats December 2013 - May 2014 A six month student project funded by Slovenian initiative Creative approach to practical knowledge. The goal was to test several computer vision algorithms for autonomous navigation in a USV built by Harpha Sea Koper, while working as a team, distributing administration work, jointly writing reports, presentations and papers. This gave the students an opportunity to gain practical engineering skills as well as team-work competences. HiMoDelLearning, analysis, and detection of motion in the framework of a hierarchical compositional visual architecture April 2011 - August 2014 The project primary goal was to develop a holistic approach towards learning, detection and recognition / categorisation of the visual motion and the phenomena derived from it. The project explored the paradigm of learning multilayer compositional hierarchies. LeOPartsLearning a large number of visual object categories for content-based retrieval in image and video databases April 2010 - August 2013 The challenge this project addressed was development of a methodology that would bridge the gap between the computer-centered low-level image features and the high-level human-centered semantic meanings. The methodology explored was hierarchical compositional models, enriched by discriminative information and extended to online learning. Computer vision for mobile computing and interaction (RS) January 2009 - December 2012 The use of computer vision makes for a very intuitive interaction with mobile device, greatly simplifying it. We developed computer vision methods suitable for mobile devices, and use them to implement designed interaction scenarios in prototype applications. POETICONThe Poetics of Everyday Life: Grounding Resources and Mechanisms for Artificial Agents January 2008 - January 2010 POETICON was a research project in the Seventh framework programme, that explored the "poetics of everyday life", i.e. the synthesis of sensorimotor representations and natural language in everyday human interaction. CogXCognitive Systems that Self-Understand and Self-Extend January 2007 - December 2010 The high level aim of this EU FP7 project was to develop a unified theory of self-understanding and self-extension with a convincing instantiation and implementation of this theory in a robot. By self-understanding we mean that the robot has representations of gaps in its knowledge or uncertainty in its beliefs. By self-extension we mean the ability of the robot to extend its own abilities or knowledge by planning learning activities and carrying them out. The project involved six universities and about 30 researchers. MobvisVision Technologies and Intelligent Maps for Mobile Attentive Interfaces in Urban Scenarios May 2005 - April 2008 The main objective in MOBVIS was to achieve a theoretical and practical leap in the application of artificial vision in smart mobile applications with a primary focus in spatial awareness and guidance. In order to achieve this goal, MOBVIS concentrated its research on the integration of multi-modal context awareness, vision based object recognition, and intelligent map technology, into an innovative form of an attentive interface, which enables perception and reasoning on a vast amount of data and in a continuously operating framework. VisiontrainVisiontrain - Marie Curie Research Training Network May 2005 - April 2008 Visiontrain was a Marie Curie Research Training Network Project that addressed the problem of understanding vision from both computational and cognitive points of view. The research approach was based on formal mathematical models and on the thorough experimental validation of these models. CoSyCognitive Systems for Cognitive Assistants September 2004 - August 2008 The main goal of this EU FP6 project was to advance the science of cognitive systems through a multi-disciplinary investigation of requirements, design options and trade-offs for human-like, autonomous, integrated, physical (eg., robot) systems, including requirements for architectures, for forms of representation, for perceptual mechanisms, for learning, planning, reasoning and motivation, for action and communication. CogVisCognitive Vision Systems May 2001 - July 2004 The main objective of this EU FP5 project CogVis was to provide the methods and techniques that enable construction of vision systems that can perform task oriented categorization and recognition of objects and events in the context of an embodied agent.