Autonomous boats perception methods
Researchers

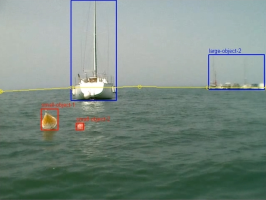
Low-end small unmanned surface vehicles (USV) are higly agile machines ideal for patrolling coastal waters. Such vehicles are typically used in perimeter surveillance, in which the USV travels along a pre-planned path. To quickly and efficiently respond to the challenges from highly dynamic environment, the USV requires an onboard logic to observe the surrounding, detect potentially dangerous situations, and apply proper route modifications. This page is a collection of algorithms and approaches that we have developed for such machines.
Projects

DAViMaRAdaptive deep perception methods for autonomous surface vehicles
ViAMaRoRobust computer vision methods for autonomous water surface vehicles
Publications