Visual tracking
Our laboratory has extensive decade-long track of working on visual tracking methods as basic reserarch and applying the algorithms to real life scenarios (e.g. robots, drones).
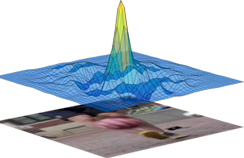
Discriminative correlation filter tracking
We explore online learning of target visual models via discriminative correlation filters. The research spans hand-crafted features and optimization techniques for CPU-based tracking as well as deep learning variants with discriminative feature adaptation and online segmentation.

Tracking transparent objects
We develop new algorithms for tracking transparent objects like glasses, cups or jars.
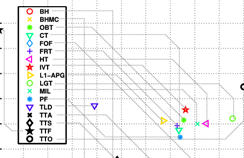
Visual object tracking performance evaluation
One of the problems of visual tracking evaluation is a lack of a consistent evaluation methodology. This is hampering the cross-paper tracker comparison and faster advancement of the field. In our research we investigate different aspects of tracking evaluation. A continuous effort that is a part of our work is also the Visual Object Tracking Challenge (VOT).
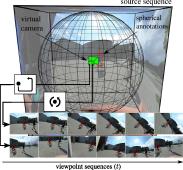
Apparent motion patterns
We propose to go beyond pre-recorded benchmarks with post-hoc annotations by presenting an approach that utilizes omnidirectional videos to generate realistic, consistently annotated, short-term tracking scenarios with exactly parameterized motion patterns..

Drone tracking
The tracking algorithms we developed can be applied to autonomous robots like drones. Here are some results from this research application.

Local-global visual models in visual tracking
We addresses the problem of tracking objects which undergo rapid and significant appearance changes. We explore coupled-layer visual models that combines the target's global and local appearance.

Multiple interacting target tracking
We addressed the problem of tracking visually similar multiple interacting targets. The problem is formulated in the probabilistic framework of particle filters. Combined color/motion visual models and new methods for modelling highly dynamic targets are explored. The presented solutions have bee applied to commercial sports tracking systems we developed between 2006-2013.
-
IEEE / CVF Computer Vision and Pattern Recognition Conference (CVPR), 2025
-
International Journal of Computer Vision, Springer, 2024
-
Matej Kristan, Aleš Leonardis, Jiri Matas, Michael Felsberg, Roman Pflugfelder, Joni-Kristian Kamarainen, Hyung Jin Chang, Martin Danelljan, Luka Čehovin Zajc, et al.ECCV Workshops 2022, 2022
-
In Proceedings of the British Machine Vision Conference (BMVC), 2022
-
IEEE Transactions on Pattern Analysis and Machine Intelligence, 2021
-
Matej Kristan, Jirı Matas, Aleš Leonardis, Michael Felsberg, Roman Pflugfelder, Joni-Kristian Kamarainen, Hyung Jin Chang, Martin Danelljan, Luka Čehovin Zajc, et al.VOT2021 challenge workshop, ICCV workshops, 2021
-
IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2020
-
ICPR, 2020
-
IEEE Transactions on Cybernetics, 2020
-
Matej Kristan, Aleš Leonardis, Jiri Matas, Michael Felsberg, Roman Pflugfelder, Joni-Kristian Kamarainen, Luka Čehovin Zajc, Martin Danelljan, Alan Lukezic, et al.ECCV2020 workshops, 2020
-
Alan Lukežič, Ugur Kart, Jani Käpylä, Ahmed Durmush, Joni-Kristian Kämäräinen, Jiří Matas and Matej KristanIEEE International Conference on Computer Vision (ICCV), 2019
-
Computer Vision and Pattern Recognition (CVPR), 2019
-
Matej Kristan, Jiri Matas, Aleš Leonardis, Michael Felsberg, Roman Pflugfelder, Joni-Kristian Kamarainen, Luka Čehovin Zajc, Ondrej Drbohlav, Alan Lukezic, et al.ICCV 2019 workshops, 2019
-
International Journal of Computer Vision, Springer, 2018
-
Asian Conference on Computer Vision, 2018
-
Proceedings of the 23rd Computer Vision Winter Workshop, 2018
-
Matej Kristan, Aleš Leonardis, Jiri Matas, Michael Felsberg, Roman Pfugfelder, Luka Čehovin Zajc, Tomas Vojir, Goutam Bhat, Alan Lukezic, et al.VOT2018 workshop, ECCV2018, 2018
-
IEEE Transactions on Cybernetics, 2017
-
IEEE Transactions on Pattern Analysis and Machine Intelligence, IEEE Computer Society, 2013
-
13th International Conference on Computer Vision, 2011
-
Systems, Man, and Cybernetics: Part B, 2010
-
Pattern Recognition, 2009
-
Computer Vision and Image Understanding, 2009
-
ISA Transactions, 2004
-
Robotics and Autonomous Systems, 2004