
Luka Čehovin Zajc, PhD
Associate Professor
luka.cehovin@fri.uni-lj.si
@lukacu
lukacu
+386 1 479 8252
About me
I am an associate professor at Visual Cognitive Systems Lab at Faculty of Computer and Information Science, University of Ljubljana. At the faculty I am involved in Multimedia Systems and Human-Computer Interaction courses.
My research interests are computer vision, machine learning, remote sensing, and human-computer interaction. I am a co-organizer of the VOT Challenge where we work on systematic visual tracker evaluation.
I also have a personal webpage.
Active Research
Remote sensing
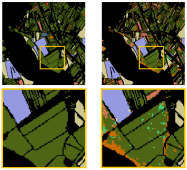
Remote sensing involves scanning of the earth by satellite or high-flying aircraft and analyzing it. Since the amount of data acquired this way is huge and growing, matchine learning can be used to perform tasks efficently. We are using modern computer vision methods and apply them to different problems in remote sensing.
Active Projects

EOFuseREarth Observation with Sensor-Fusion and Representation Learning
January 2025
-
April 2026
This ESA funded project investigates the relationship between sensor fusion and self-supervised learning for data-driven Earth Observation. We focus on the role of self-supervised deep learning for sensor fusion from the perspective of different sources with different spatial resolutions and spectral coverage. The project is grounded in a real-world application in the field of hydrology, where the goal is to predict the water level in rivers using satellite and drone imagery.

RoDEORobust Deep Learning for Earth Observation
January 2025
-
December 2027
This ARIS funded project investigats the relationship between sensor fusion and self-supervised learning for data-driven Earth Observation. We focus on the role of self-supervised deep learning for sensor fusion from the perspective of different sources with different spatial resolutions and spectral coverage. The project is grounded in a real-world application in the field of hydrology, where the goal is to predict the water level in rivers using satellite and drone imagery.
The Life and Death of Cultivated Terraces: Computer-Based Recognition and Spatial Analysis of Terraces
January 2025
-
December 2027
Terraced landscapes are cultural landscapes of special significance. Cultivated terraces, which are often intended for farming, ensure food and have a priceless ecological, cultural, and historical value. Terraced landscapes are disappearing in places due to overgrowth or improper maintenance. In order to raise awareness of their significance, the Honghe Declaration was passed at the global level in 2010. Slovenia still has not managed to implement suitable criteria for terrace identification or introduce a comprehensive management system despite having officially recognized terraces as a valuable element for landscape preservation (see the Decree on Cross-Compliance, Official Gazette of the Republic of Slovenia, no. 97/2015). A precise overview (register) of the locations of cultivated terraces and spatial analyses are required as the foundation for any further measures.
Recent Publications
-
IEEE / CVF Computer Vision and Pattern Recognition Conference (CVPR), 2026
-
IEEE Transactions on Geoscience and Remote Sensing, 2025
-
European Journal of Remote Sensing, Taylor & Francis, 2025
-
ROSUS 2024 - Računalniška obdelava slik in njena uporaba v Sloveniji 2024, 2024
-
Remote Sensing, MDPI, 2024
-
Matej Kristan, Jiri Matas, Pavel Tokmakov, Michael Felsberg, Luka Čehovin Zajc, Alan Lukežič, Khanh-Tung Tran, Xuan-Son Vu, Johanna Bjorklund, et al.European conference on computer vision workshops, VOTS2024 workshop, 2024
-
Moravian Geographical Reports, 2024
-
Elektrotehniški vestnik, Journal of Electrical Engineering and Computer Science, 2023
-
Transactions on Learning Technologies, IEEE, 2023