Researchers


A compact and expressive spatial representation is crucial for effective operation of a service robot in the real world environments. We present here:
- A new category-specific higher layer of a hierarchical representation of space that is based on 2D laser-range data.
- A new algorithm (MCABE) that finds a dictionary of exemplar elements from a multi-category set, based on the affinity measure defined among pairs of elements.
The freely available Domestic Rooms Dataset has been extended in this work and used for model evaluation in the context of a room categorization problem.
#Local-Map Visibility Graphs
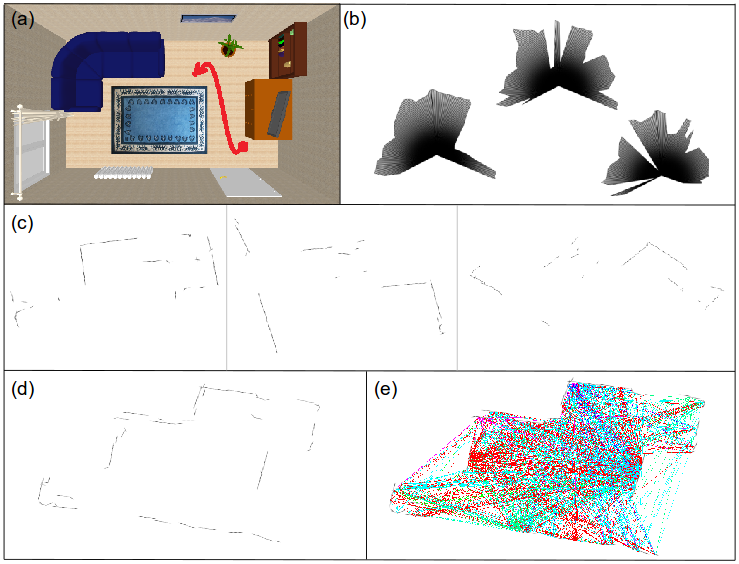
Higher layer parts, named local-map visibility graphs (LMVGs) are formed by merging partial views of the environment, represented by lower layers. Merging is performed using a simultaneous localization and mapping (SLAM) algorithm that produces local maps, from which graph-based structures are extracted (Figure 1).
MCABE
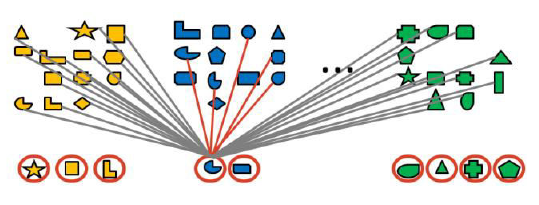
Part selection in the higher layer construction is performed by the new learning algorithm (Figure 2), named Multi-Category Affinity-Based Exemplars-search (MCABE). The method is general and is not restricted to our model.
Room categorization is performed through higher-layer part detection. Some results, obtained on the Domestic Rooms Dataset, are shown below in Table 1. The proposed approach achieved state-of-the-art results by achieving the most balanced categorization performance over all categories.