Researchers



Interactive and online learning is important in cognitive computer vision and cognitive
robotics. Since most of the real-world environments are ever-changing, and all the information which they provide cannot be available (nor processed) at once, an agent or a system interacting within such an environment has to fulfill some general requirements in the way it builds the models of its environment:
- The learning algorithm should be able to create and update the models as new data arrives.
- The models should be updated without explicitly requiring access to the old data.
- The computational effort needed for a single update should not depend on the amount of data observed sofar.
- The models should be compact and should not grow significantly with the number of training instances.
Furthermore, in real-life scenarios, an erroneus information will typically get incorporatedinto the models. In such situations, the models should allow for error-recovery without the need of complete relearning. This is especially important in the user-agent interaction settings, in which the user can provide not only positive but negative examples as well to improve the agents knowledge about its environment. Therefore, another requirement (5) is that:
- the models should support the process of unlearning, i.e., they have to allow online adaptation using the negative examples as well.
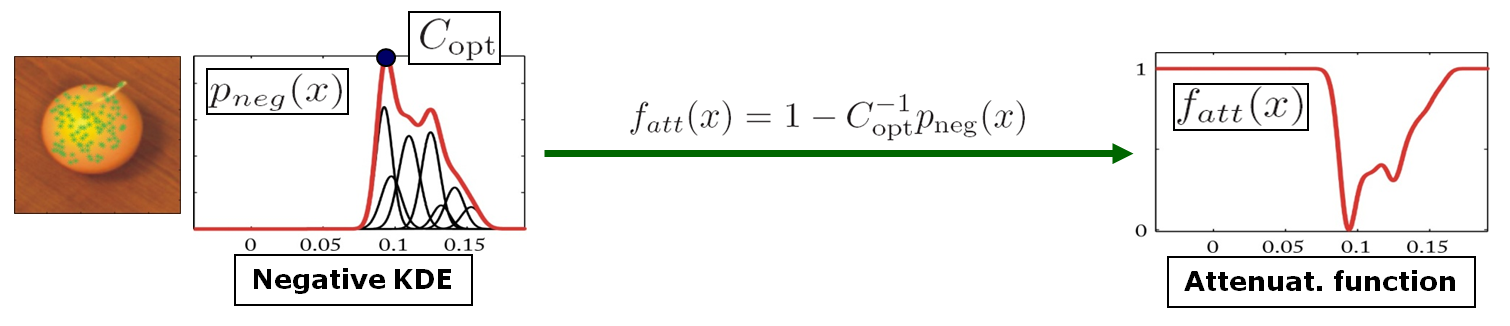
We proposed a solition based on Kernel Density Estimators (KDE) summarized in the following. Here’s an example of generating a negative KDE of an object’s color:
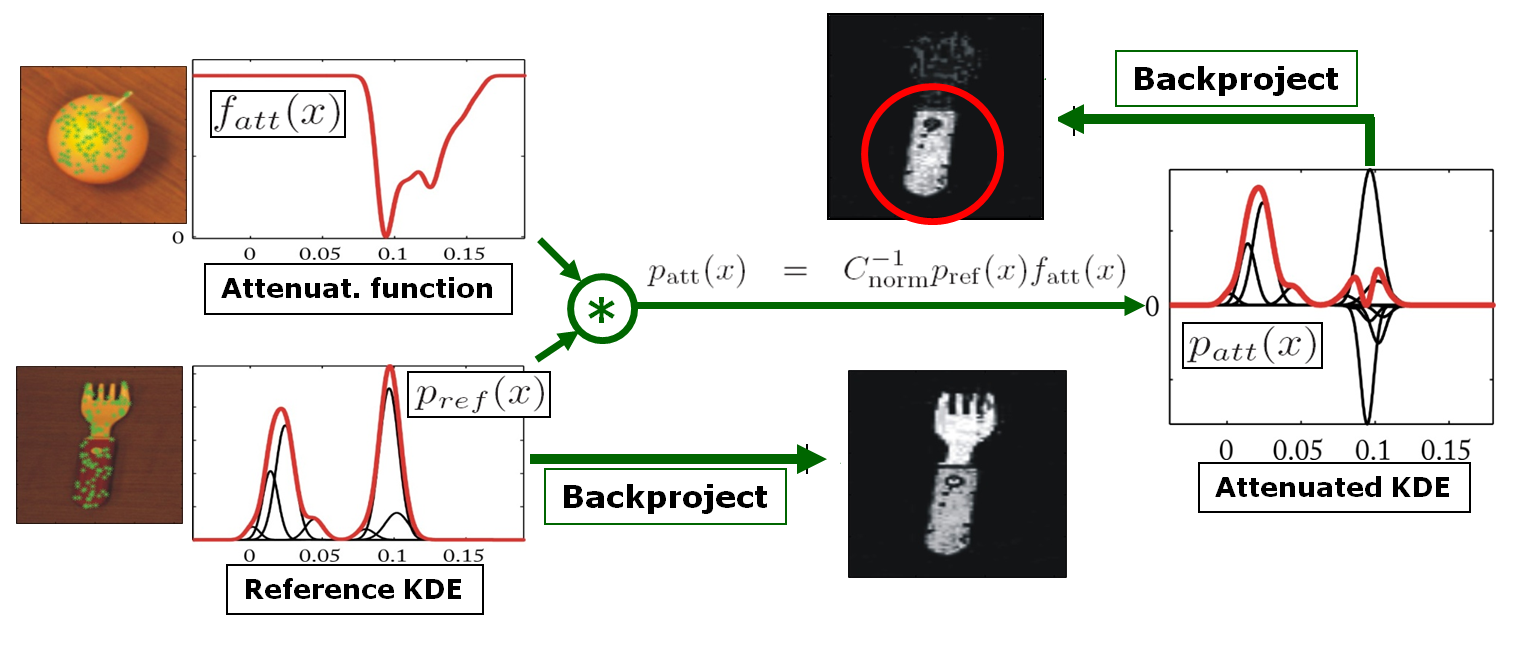
Then assume we try to learn the red color, by showing a red and yellow object and tell to the robot that the color learned in the previous example is not part of the concept “red”. Here’s the KDE solution:
Here’s a video example for online learning a challenging 1D pdf: