About
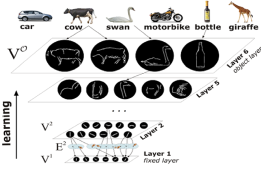
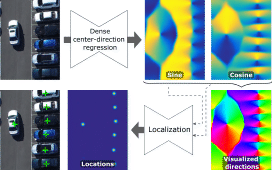
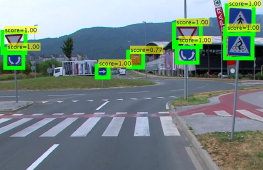
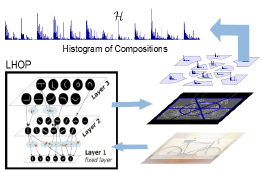
Domen Tabernik is a research associate at the Visual Cognitive Systems (ViCoS) Laboratory at the University of Ljubljana, Faculty of Computer and Information Science. His doctoral dissertation investigated hierarchical and compositional representations for visual recognition using deep neural models. His current research focuses on deep learning methods for computer vision, particularly visual anomaly detection and industrial surface inspection. He develops data-efficient models for defect detection and segmentation in industrial environments, including approaches based on weak or mixed supervision that reduce the need for extensive manual annotation while maintaining high detection accuracy. Beyond industrial inspection, his work includes point-supervised learning methods for object counting and localization, such as dense center-direction regression models, as well as vision-based methods for robotic manipulation, including grasp detection and handling of deformable objects. He has contributed to several research and development projects on data-driven machine vision systems, advancing the practical deployment of deep learning in industrial inspection, infrastructure monitoring, and robotics.
Research Topics

Downloads and Code

Current projects